祝贺课题组新增一项发明专利:基于制动作用指数的连续长下坡路段线形质量评价方法(ZL201711411814.4,开发人员:张驰;张宏;秦际涵;冯逸伟;侯宇迪;韩方元;张敏;亓鑫)
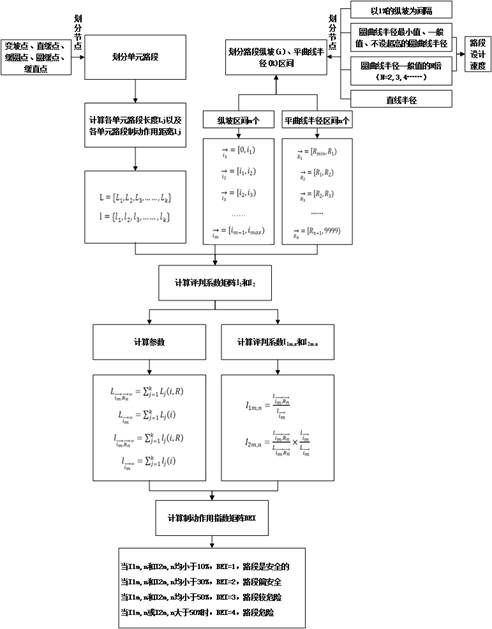
本发明公开的一种基于制动作用指数的连续长下坡路段线形质量评价方法,(1)将路段L分为k个单元路段,每个单元路段内采取制动措施的路段视为该单元路段的一个子集;(2)计算各单元路段的长度Lj和各单元路段内的制动作用距离lj;(3)将路段纵坡(i)分为m个区间,平曲线半径(R)分为n个区间;(4)依据步骤(3)中路段的纵坡区间和平曲线半径区间划分不同的平纵组合路段,并计算各平纵组合路段内的评判系数I1m,n和I2m,n,最终得到路段的评判系数矩阵I1和I2;(5)依据步骤(4)计算出的评判系数矩阵I1和I2,得到路段的制动作用指数矩阵BEI;将路段危险程度、制动作用距离、路段平纵线形三者建立联系,建立了线形质量分级模型,具有更强的适应性。